
144
Arduino 서보 모터 제어 코드 설명
1. 라이브러리 포함
#include <Servo.h>Arduino에서 서보 모터를 제어하기 위해 Servo 라이브러리
를 포함합니다. 이 라이브러리는 서보 모터의 각도를 설정하고 제어하는 데 필요한 함수를 제공합니다.
2. Servo 객체 생성
Servo myServo;myServo라는 이름의 Servo 객체를 생성합니다. 이 객체를 통해 서보 모터를 제어할 수 있습니다.
3. 서보 핀 정의
int servoPin = 9;서보 모터가 연결된 핀을 정의합니다. 이 코드에서는 핀 9에 서보 모터를 연결했습니다.
4. 설정 함수 (setup)
void setup() {
myServo.attach(servoPin);
}setup() 함수는 Arduino가 시작될 때 한 번 실행되는 함수입니다. myServo.attach(servoPin);을 통해 핀 9에 연결된 서보 모터를 Servo 객체와 연결합니다.
5. 반복 함수 (loop)
void loop() {
myServo.write(0);
delay(1000);
myServo.write(90);
delay(1000);
myServo.write(180);
delay(1000);
}loop() 함수는 Arduino가 실행되는 동안 계속 반복됩니다.
myServo.write(0);: 서보를 0도로 이동합니다.myServo.write(90);: 서보를 90도로 이동합니다.myServo.write(180);: 서보를 180도로 이동합니다.
각 위치로 이동한 후 delay(1000);을 통해 1초(1000밀리초) 동안 대기합니다. 이를 통해 서보가 새로운 위치에 도달할 충분한 시간을 줍니다.
전체 동작
서보 모터는 0도, 90도, 180도 위치로 차례로 이동하고, 각 위치에서 1초 동안 유지됩니다.
이 루프는 계속 반복되므로 서보 모터는 0도, 90도, 180도를 순서대로 움직이며 멈추지 않고 동작합니다.
추가 설명
Servo 라이브러리는 서보 모터를 간단하게 제어할 수 있도록 지원하며, PWM(Pulse Width Modulation) 신호를 통해 각도를 조절합니다.
이 코드로 서보 모터의 기본적인 동작을 이해하고 제어할 수 있습니다.
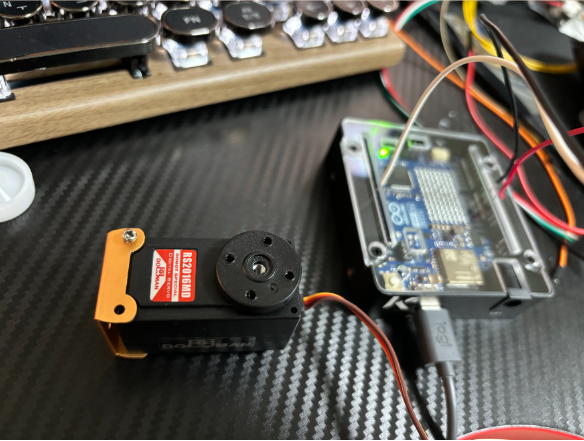
- 결과 사진
#include <Servo.h>
// Create a Servo object
Servo myServo;
// Define the pin connected to the servo
int servoPin = 9;
void setup() {
// Attach the servo on pin 9 to the Servo object
myServo.attach(servoPin);
}
void loop() {
// Move the servo to 0 degrees
myServo.write(0);
delay(1000); // Wait for 1 second
// Move the servo to 90 degrees
myServo.write(90);
delay(1000); // Wait for 1 second
// Move the servo to 180 degrees
myServo.write(180);
delay(1000); // Wait for 1 second
}